使用Open Dynamics Engine实现刚体动力学仿真
刚体动力学一般力学的一个分支,研究刚体在外力作用下的运动规律。它是计算机器部件的运动,舰船、飞机、火箭等航行器的运动以及天体姿态运动的力学基础。
常见的多刚体动力学商业软件有RecurDyn,ADAMS等。而ODE (Open Dynamic Engine) 是一个免费的具有工业品质的刚体动力学的库,一款优秀的开源物理引擎,它为主程序员Russell Smith和几位开源社区贡献者共同努力下开发的。它能很好地仿真现实环境中的可移动物体,它是快速,强健和 可移植的。而且它有内建的碰撞检测系统。
1. ODE的安装
ODE的安装非常简单,从其官方网站https://www.ode.org,找到在BitBucket中的代码库地址,使用git直接下载整个代码库,并使用cmake进行编译安装。此外也可以使用各Linux发行版的包管理器进行安装。
pacman -S ode #下载源代码 git clone https://bitbucket.org/odedevs/ode.git cmake . make其中还附带了Python的API,在源代码的bindings/python目录下,运行其中的setup.py脚本可以完成Python接口的编译和安装。
python setup.py build python setup.py install
2. ODE的模块组成
ODE中对于整个模型分为世界World,刚体Body,约束(铰接)Joints ,力Force,几何体Geometry等。通过在World中增加Boby及Joints等连接约束关系,建立整个多刚体等力学模型,并通过不断循环时间步长通过积分来计算整个系统的下个状态。代码的基本框架如下
import ode; #创建时间 world = ode.World(); #设置重力 world.setGravity((0, -9.8, 0)); #新建一个刚体 b1 = ode.Body(world); #设置时间补偿 TIME_STEP = 0.01; #进行1000次积分循环 for i in range(0, 1000): #得到当前刚体的位置 x1, y1, z1 = b1.getPosition(); world.step(TIME_STEP);
3. 双摆的运动模拟及双摆曲线的绘制
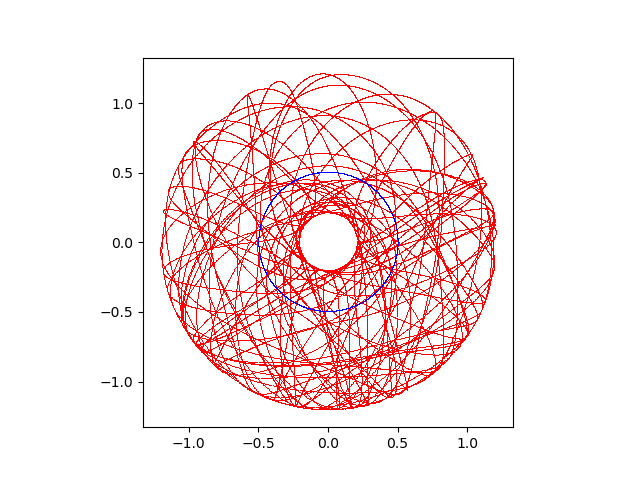
建立一个双摆的模型并绘制两个摆动点的轨迹,两个质点的初始位置和初始速度分别为,(0, -0.5, 0),(10, 0, 0)和(0.5, -1.0, 0),(0, 0, 0)。并建立连接,由于这里是二维问题,使用球铰和圆柱铰并没有本质区别,就直接使用球铰了,其他类型的铰还需要给定方向等相关的参数。程序的代码如下
import numpy; import ode; from matplotlib import pyplot as plt; import matplotlib.animation as animation; if __name__ == '__main__': #创建世界 world = ode.World(); world.setGravity((0, -9.8, 0)); #创建第一个质点 b1 = ode.Body(world); #设置初始位置和速度 b1.setPosition((0, -0.5, 0)) b1.setLinearVel((10, 0, 0)); #设置质量和外形 m1 = ode.Mass(); m1.setSphereTotal(0.1, 0.05); b1.setMass(m1); #创建第二个质点 b2 = ode.Body(world); #设置初始位置,默认初始速度为0 b2.setPosition((0.5, -1.0, 0)); #设置质量和外形 m2 = ode.Mass(); m2.setSphereTotal(0.1, 0.05); b2.setMass(m2); #创建第一个质点和环境的约束 j1 = ode.BallJoint(world); j1.attach(b1, ode.environment); j1.setAnchor((0.0, 0.0, 0.0)); #创建第二个质点和第一个质点之间的约束 j2 = ode.BallJoint(world); j2.attach(b1, b2); j2.setAnchor((0, -0.5, 0)); #设置时间步长 TIME_STEP = 0.01; fig, ax = plt.subplots(); for i in range(0, 20000): #分别获得两个质点的位置 x1, y1, z1 = b1.getPosition(); x2, y2, z2 = b2.getPosition(); #绘制当前的位置 plt.plot(x1, y1, 'b,'); plt.plot(x2, y2, 'r,'); #进入下一时刻 world.step(TIME_STEP); #设置绘图的X和Y轴保持相同的比例 ax.set_aspect('equal'); #保持绘制的图片 plt.savefig('1.png');由于Python接口只能支持Python2,如今已经几乎不能用了,附上C版本的代码
#include <ode/ode.h> int main() { const dReal TIME_STEP = 0.01; const dReal TIME_STOP = TIME_STEP * 200; dInitODE(); dWorldID w = dWorldCreate(); dWorldSetGravity(w, 0.0, -9.8, 0.0); dBodyID b1 = dBodyCreate(w); dBodySetPosition(b1, 0.0, -0.5, 0.0); dBodySetLinearVel(b1, 10.0, 0.0, 0.0); dMass m1; dMassSetSphereTotal(&m1, 0.1, 0.05); dBodySetMass(b1, &m1); dBodyID b2 = dBodyCreate(w); dBodySetPosition(b2, 0.5, -1.0, 0.0); dMass m2; dMassSetSphereTotal(&m2, 0.1, 0.05); dBodySetMass(b2, &m2); dJointGroupID jd = dJointGroupCreate(10); dJointID j1 = dJointCreateBall(w, jd); dJointAttach(j1, b1, 0); dJointSetBallAnchor(j1, 0.0, 0.0, 0.0); dJointID j2 = dJointCreateBall(w, jd); dJointAttach(j2, b1, b2); dJointSetBallAnchor(j2, 0.0, -0.5, 0.0); dReal total_time = 0.0; while (total_time < TIME_STOP) { const dReal* u1 = dBodyGetPosition(b1); const dReal* u2 = dBodyGetPosition(b2); printf("%f\t%f\t%f\t%f\n", u1[0], u1[1], u2[0], u2[1]); dWorldStep(w, TIME_STEP); total_time += TIME_STEP; } dBodyDestroy(b1); dBodyDestroy(b2); dJointDestroy(j1); dJointDestroy(j2); dJointGroupDestroy(jd); dWorldDestroy(w); dCloseODE(); return 0; }运行后得到的双摆轨迹曲线如下图所示,混乱中似乎有带有一些美感。